Virtual Channel (V4L2 Sensor)
Important
All the bash commands shown here are based on Genio 510/700-EVK. For Genio 510-EVK, users can follow the same step to do the whole setup by changing the naming term from 700 to 510.
Note
All command operations presented in this chapter are based on Genio 700-EVK. You might get different operation results depending on the platform you use.
This chapter shows how to use virtual channel sensors (e.g. SerDes) under V4L2 Sensor architecture on Genio 510/700-EVK.
Introduction To Virtual Channel And SerDes
Virtual Channel
The MIPI Camera Serial Interface (CSI) is a standard communication protocol used primarily for transmitting data between cameras and host processors. One of the key features of the MIPI CSI protocol is Virtual Channel. This feature is particularly important as it enhances the flexibility and scalability of camera systems in embedded applications.
Virtual channels are logical channels that allow multiple video streams to be transmitted over a single physical connection. This means that a single MIPI CSI interface can handle data from multiple camera sources simultaneously, without the need for additional physical lanes. Each virtual channel is identified by a unique ID, which is used to distinguish between different streams of data.
When a camera captures an image, the data is packaged into frames and tagged with the virtual channel ID. The host processor (e.g. MT8370, MT8390, MT8395) then uses these IDs to route and process each stream appropriately. This process is seamless and transparent to the end-user but requires careful configuration and synchronization to ensure data integrity and timely delivery.
The benefits of virtual channels are
Efficiency: Maximize the use of the physical lanes available, allowing for more data throughput without the need for extra hardware.
Flexibility: Transmit multiple streams from different cameras, which can be useful in advanced applications that require data from multiple sensors.
Cost-effective: Reduce the number of physical connections needed for multiple camera setups to lower the overall system cost and complexity.
SerDes
SerDes, short for Serializer/Deserializer, is a crucial technology used in high-speed communications. It facilitates the transfer of data over a differential pair of wires or a single high-speed data lane. This technology is fundamental in various applications, including data centers, consumer electronics, automotive systems, and telecommunications.
The serializer converts parallel data into a serial stream, reducing the number of data paths and thus minimizing the number of wires needed for data transmission. Conversely, the deserializer performs the opposite function. It converts the serial data back into parallel form, making it usable by the receiving system.
In a typical SerDes setup, the serializer (e.g. MAX96705) receives parallel data from the data source along with a clock signal. It aligns the data bits into a serial stream and sends it over a high-speed transmission medium. At the receiving end, the deserializer (e.g. MAX9286) extracts the clock and realigns the incoming serial data into parallel format. Finally, the deserializer transmits the parallel data to the host receiver.
The benefits of using SerDes are
Reduced Complexity: By minimizing the number of physical connections required for data transmission, SerDes simplifies board layout and reduces hardware complexity.
Increased Speed: Enables high-speed data transmission that is essential for modern applications, such as video streaming, high-performance computing, and high-speed networking.
Improved Signal Integrity: Helps in maintaining the quality of the signal over longer distances by using differential signaling.
Camera Daughter Board
The SerDes camera DTB for Genio 510/700-EVK is CAM DTB-D7.
It contains a Maxim MAX9286 deserializer.
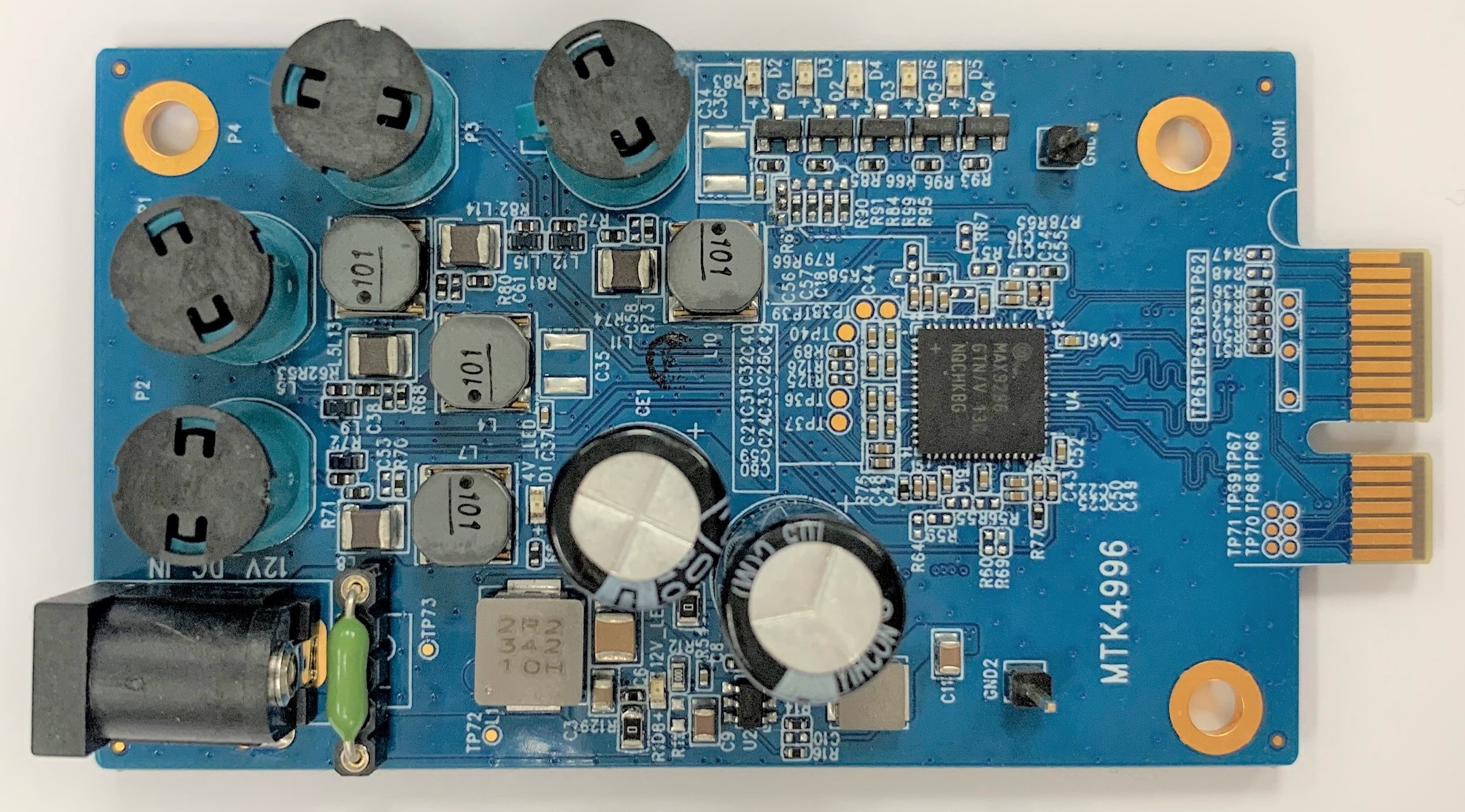
Camera DTB D7 - Maxim MAX9286 Deserializer
Important
The SerDes Camera DTB CAM DTB-D7 needs an additional 12V power supply for PoC (Power Over Coax).
Make sure the power is set correctly before using them.
The camera module is ABEO AG190C.
It contains an OV10640 sensor, an OV490 ISP, and a MAX96705 serializer.

Camera Module - ABEO AG190C
Connect The SerDes To The EVK
There are 2 MIPI-CSI sockets on Genio 510/700-EVK, which are CSI0 and CSI1.
In the following figure, the camera DTB is connected to the CSI0 socket.
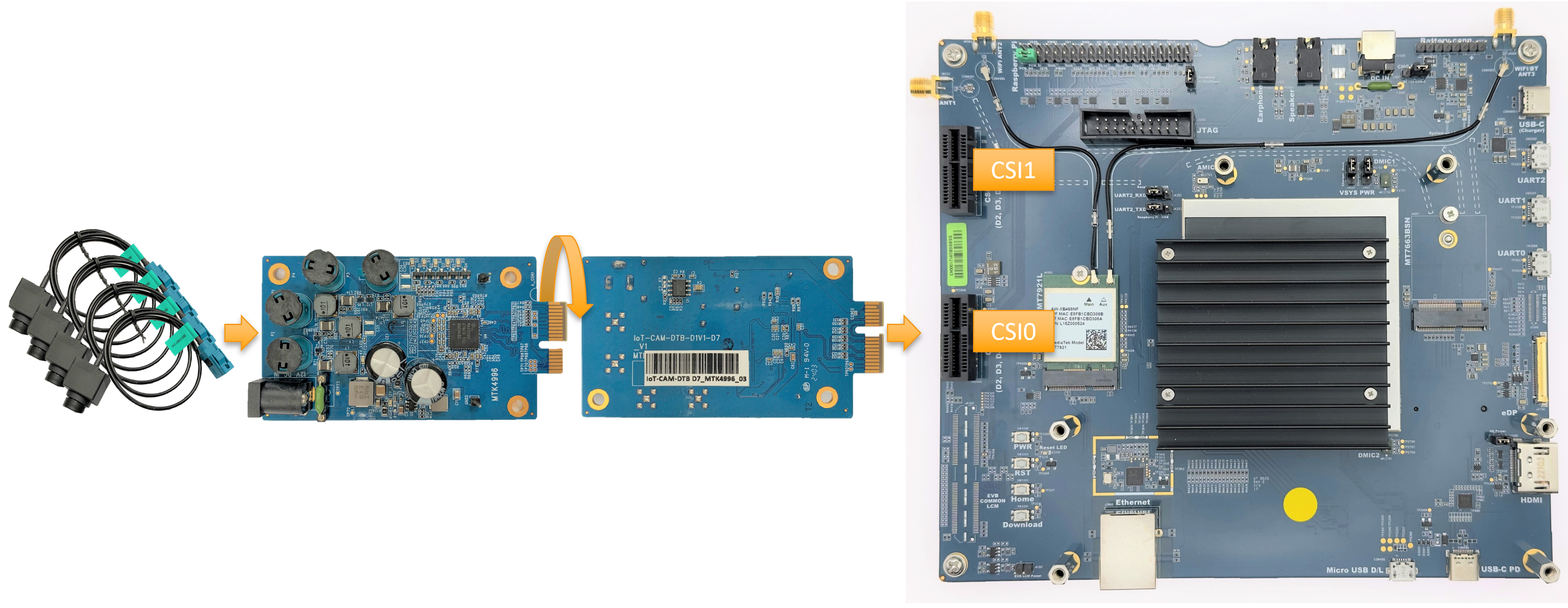
Genio 510/700-EVK with 1x CAM-DTB-D7 and 4x ABEO AG190C sensors
The hardware connection is AG190C ---> MAX9286 ---> MIPI-CSI On EVK.

Hardware Block Diagram of Single SerDes and SoC
After finishing the above steps, the hardware connection is complete.
Select Camera Device Tree Blob Overlay
The camera device is inactive by default, so the kernel has to load a specific device tree blob overlay to enable it. Please refer to the bl33 (u-boot) section for how to load DTBO.
The following table shows the supported SerDes DTBO in V4L2 sensor architecture.
Platform |
CSI0 |
CSI1 |
DTBO |
Usage |
|---|---|---|---|---|
Genio 510/700-EVK |
MAX9286+AG190C |
x |
camera-ag190c-max9286-csi0-std.dtbo |
Enable 4-lane CAM-DTB-D7 w/ ABEO AG190C on CSI0 |
Genio 510/700-EVK |
MAX9286+AG190C |
MAX9286+AG190C |
camera-ag190c-max9286-dual-std.dtbo |
Enable 4-lane CAM-DTB-D7 w/ ABEO AG190C on CSI0 and CSI1 |
genio-flash --list-dtbo
List of available DTBO:
- camera-ag190c-max9286-csi0-std.dtbo
- camera-ag190c-max9286-dual-std.dtbo
- ...
genio-flash --load-dtbo camera-ag190c-max9286-csi0-std.dtbo --load-dtbo gpu-mali.dtbo --load-dtbo apusys.dtbo --load-dtbo video.dtbo
Media Device
The media device represents the internal topology of a media system like ISP. The topology setting including links, pads, and entities can be set through the media device. Therefore, the first step is to find the target media device node.
export MEDIA_DEV=$(v4l2-ctl -z platform:$(basename `find /sys/bus/platform/devices/ -name "*camisp"`) --list-devices | grep media)
echo ${MEDIA_DEV}
/dev/media3
Warning
The assigned node number for the media device may vary depending on the sequence of the probing process during the boot-up phase. As such, it is crucial to ensure the accuracy of the media device node before using the camera.
Video Device
The video device is the interface for users to obtain the images. On Genio 510/700-EVK, they are called mtk-cam camsv-* main-stream.
The media-ctl is a useful tool to list video devices.
declare -a VIDEO_DEV=(`for i in {0..7}; do media-ctl -d ${MEDIA_DEV} --entity "mtk-cam camsv-$i main-stream"; done | tr "\n" " "`)
echo ${VIDEO_DEV[*]}
/dev/video53 /dev/video54 /dev/video55 /dev/video56 /dev/video57 /dev/video58 /dev/video59 /dev/video60
Warning
The assigned node number for the video device may vary depending on the sequence of the probing process during the boot-up phase. As such, it is crucial to ensure the accuracy of the video device node before using the camera.
Launch Camera
The initial step is to link all the necessary components within the media device. The structure of the YUV camera pipeline is quite straightforward. It fundamentally incorporates only three components: the sensor, SENINF, and CAMSV.
# Set the name of MAX9286
MAX9286_1_NAME="max9286 5-0048"
media-ctl -d ${MEDIA_DEV} -l "'${MAX9286_1_NAME}':4 -> 'seninf-0':0 [1]"
media-ctl -d ${MEDIA_DEV} -l "'seninf-0':1 -> 'mtk-cam camsv-0':0 [5]"
media-ctl -d ${MEDIA_DEV} -l "'seninf-0':2 -> 'mtk-cam camsv-1':0 [5]"
media-ctl -d ${MEDIA_DEV} -l "'seninf-0':3 -> 'mtk-cam camsv-2':0 [5]"
media-ctl -d ${MEDIA_DEV} -l "'seninf-0':4 -> 'mtk-cam camsv-3':0 [5]"
If you use Linux kernel version 6.6 or later, you MUST configure the internal routing of the V4L2 sub-device to specify that sink pad 0 of seninf-0 will be multiplexed to multiple source pads (1 through 4).
media-ctl -d ${MEDIA_DEV} -R "'seninf-0' [0/0->1/0[1],0/0->2/0[1],0/0->3/0[1],0/0->4/0[1]]"
The second step is to assign the correct format and size to each component incorporated in the camera pipeline.
media-ctl -d ${MEDIA_DEV} -V "'seninf-0':0 [fmt:UYVY8_1X16/1280x800 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'seninf-0':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'seninf-0':2 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'seninf-0':3 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'seninf-0':4 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-0':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-1':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-2':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-3':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
For the third step, it’s necessary to identify the correct video device node. For further information on this, please refer to Video Device.
declare -a VIDEO_DEV=(`for i in {0..7}; do media-ctl -d ${MEDIA_DEV} --entity "mtk-cam camsv-$i main-stream"; done | tr "\n" " "`)
echo ${VIDEO_DEV[*]}
/dev/video53 /dev/video54 /dev/video55 /dev/video56 /dev/video57 /dev/video58 /dev/video59 /dev/video60
Important
You have to select the video node that corresponds to the CAMSV instance linked in the second step.
In this given example, mtk-cam camsv-0/1/2/3 are the linked instances, hence the video device node should be
${VIDEO_DEV[0]}, ${VIDEO_DEV[1]}, ${VIDEO_DEV[2]}, ${VIDEO_DEV[3]} or /dev/video{53,54,55,56}.
Lastly, to activate the camera, the user can use v4l2-ctl, gst-launch-1.0, or other V4L2 applications.
Use
v4l2-ctlv4l2-ctl -d ${VIDEO_DEV[0]} --set-fmt-video=width=1280,height=720,pixelformat=YUYV --stream-mmap --stream-count=10 --stream-to=/tmp/serdes_vc0.yuv --verbose v4l2-ctl -d ${VIDEO_DEV[1]} --set-fmt-video=width=1280,height=720,pixelformat=YUYV --stream-mmap --stream-count=10 --stream-to=/tmp/serdes_vc1.yuv --verbose v4l2-ctl -d ${VIDEO_DEV[2]} --set-fmt-video=width=1280,height=720,pixelformat=YUYV --stream-mmap --stream-count=10 --stream-to=/tmp/serdes_vc2.yuv --verbose v4l2-ctl -d ${VIDEO_DEV[3]} --set-fmt-video=width=1280,height=720,pixelformat=YUYV --stream-mmap --stream-count=10 --stream-to=/tmp/serdes_vc3.yuv --verbose
Use
gst-launch-1.0gst-launch-1.0 v4l2src device=${VIDEO_DEV[0]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=640,height=480 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[1]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=640,height=480 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[2]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=640,height=480 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[3]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=640,height=480 ! waylandsink sync=false &
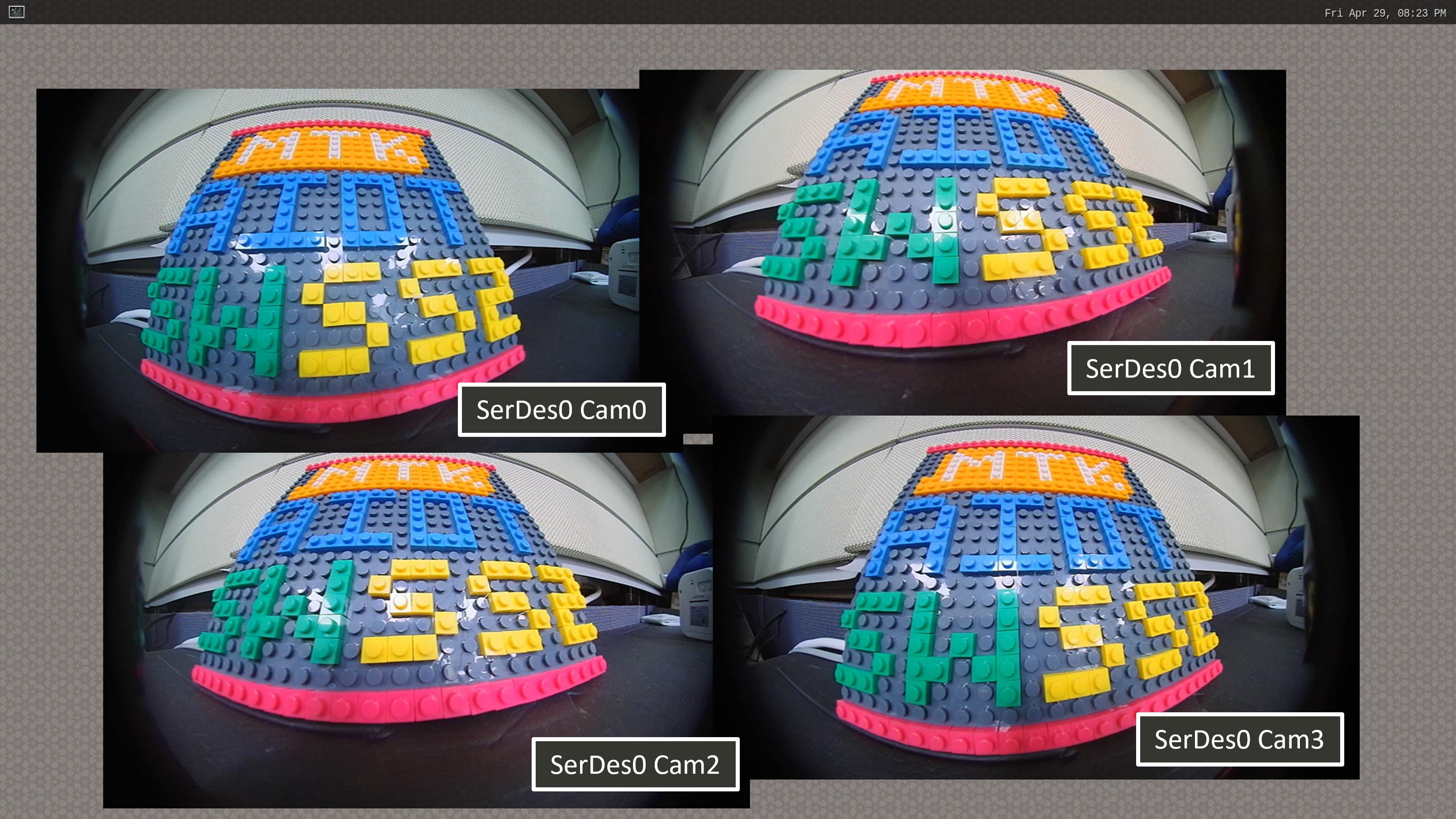
Show 4x SerDes stream on Weston
Note
To use MediaTek video codec and MDP hardware, the user has to load video.dtbo. For more details, please refer to Genio 700-EVK Video Codec.
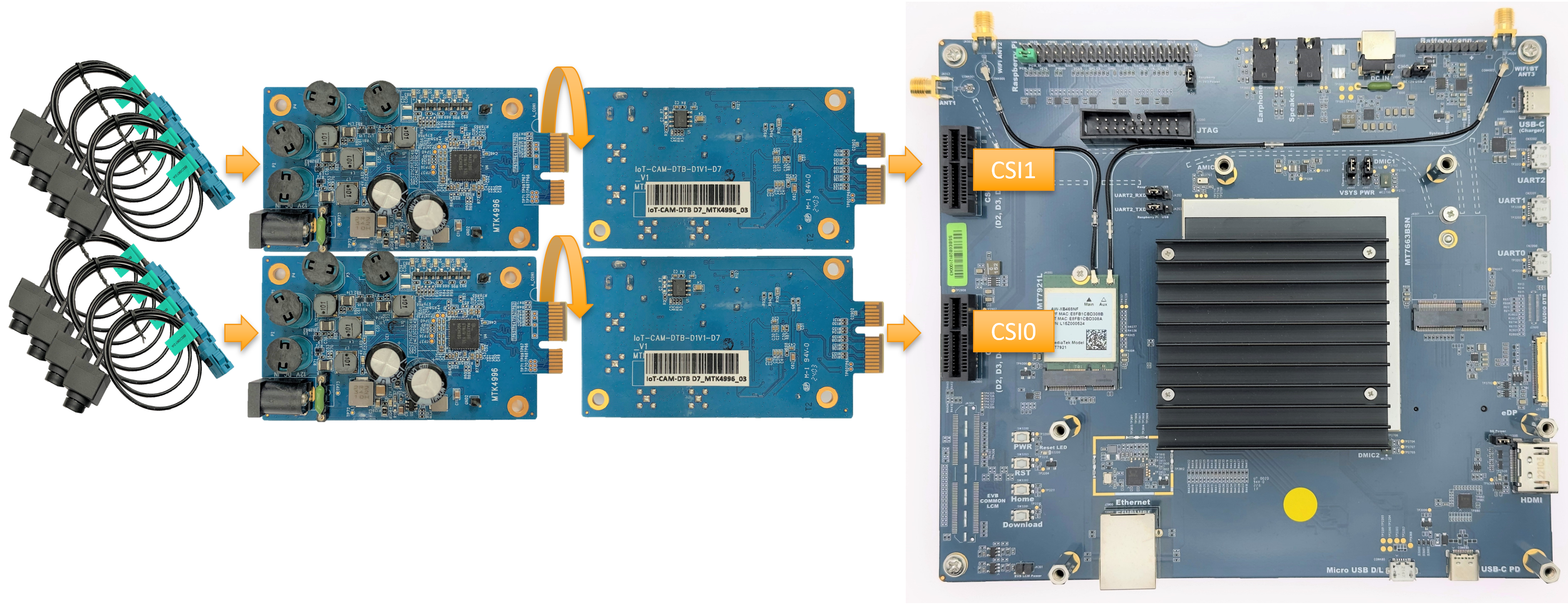
Dual Maxim SerDes MAX9286 & ABEO AG190C
Hardware Setup
Prepare 2x CAM-DTB-D7 and 8x ABEO AG190C sensors
Connect the DTB to CSI0 and CSI1 slots

Software Setup
Select the dtbo
camera-ag190c-max9286-dual-std.dtbothroughgenio-flashgenio-flash --load-dtbo camera-ag190c-max9286-dual-std.dtbo --load-dtbo gpu-mali.dtbo --load-dtbo video.dtboFind the media device of the camera system
export MEDIA_DEV=$(v4l2-ctl -z platform:$(basename `find /sys/bus/platform/devices/ -name "*camisp"`) --list-devices | grep media) echo ${MEDIA_DEV} /dev/media3
Set the media topology and the format on the EVK
# Set the name of MAX9286 MAX9286_1_NAME="max9286 5-0048" MAX9286_2_NAME="max9286 3-0048" # Set CSI0 pipeline media-ctl -d ${MEDIA_DEV} -l "'${MAX9286_1_NAME}':4 -> 'seninf-0':0 [1]" media-ctl -d ${MEDIA_DEV} -l "'seninf-0':1 -> 'mtk-cam camsv-0':0 [5]" media-ctl -d ${MEDIA_DEV} -l "'seninf-0':2 -> 'mtk-cam camsv-1':0 [5]" media-ctl -d ${MEDIA_DEV} -l "'seninf-0':3 -> 'mtk-cam camsv-2':0 [5]" media-ctl -d ${MEDIA_DEV} -l "'seninf-0':4 -> 'mtk-cam camsv-3':0 [5]" media-ctl -d ${MEDIA_DEV} -R "'seninf-0' [0/0->1/0[1],0/0->2/0[1],0/0->3/0[1],0/0->4/0[1]]" # Set if using Linux kernel v6.6+ media-ctl -d ${MEDIA_DEV} -V "'seninf-0':0 [fmt:UYVY8_1X16/1280x800 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-0':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-0':2 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-0':3 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-0':4 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-0':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-1':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-2':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-3':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" # Set CSI1 pipeline media-ctl -d ${MEDIA_DEV} -l "'${MAX9286_2_NAME}':4 -> 'seninf-1':0 [1]" media-ctl -d ${MEDIA_DEV} -l "'seninf-1':1 -> 'mtk-cam camsv-4':0 [5]" media-ctl -d ${MEDIA_DEV} -l "'seninf-1':2 -> 'mtk-cam camsv-5':0 [5]" media-ctl -d ${MEDIA_DEV} -l "'seninf-1':3 -> 'mtk-cam camsv-6':0 [5]" media-ctl -d ${MEDIA_DEV} -l "'seninf-1':4 -> 'mtk-cam camsv-7':0 [5]" media-ctl -d ${MEDIA_DEV} -R "'seninf-1' [0/0->1/0[1],0/0->2/0[1],0/0->3/0[1],0/0->4/0[1]]" # Set if using Linux kernel v6.6+ media-ctl -d ${MEDIA_DEV} -V "'seninf-1':0 [fmt:UYVY8_1X16/1280x800 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-1':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-1':2 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-1':3 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'seninf-1':4 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-4':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-5':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-6':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]" media-ctl -d ${MEDIA_DEV} -V "'mtk-cam camsv-7':1 [fmt:YUYV8_1X16/1280x720 field:none colorspace:srgb]"
Find the video device of the camera system
declare -a VIDEO_DEV=(`for i in {0..7}; do media-ctl -d ${MEDIA_DEV} --entity "mtk-cam camsv-$i main-stream"; done | tr "\n" " "`)Launch dual Maxim SerDes MAX9286 pipeline to show images on the Weston desktop
gst-launch-1.0 v4l2src device=${VIDEO_DEV[0]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[1]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[2]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[3]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[4]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[5]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[6]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false & gst-launch-1.0 v4l2src device=${VIDEO_DEV[7]} ! video/x-raw,width=1280,height=720,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=320,height=240 ! waylandsink sync=false &
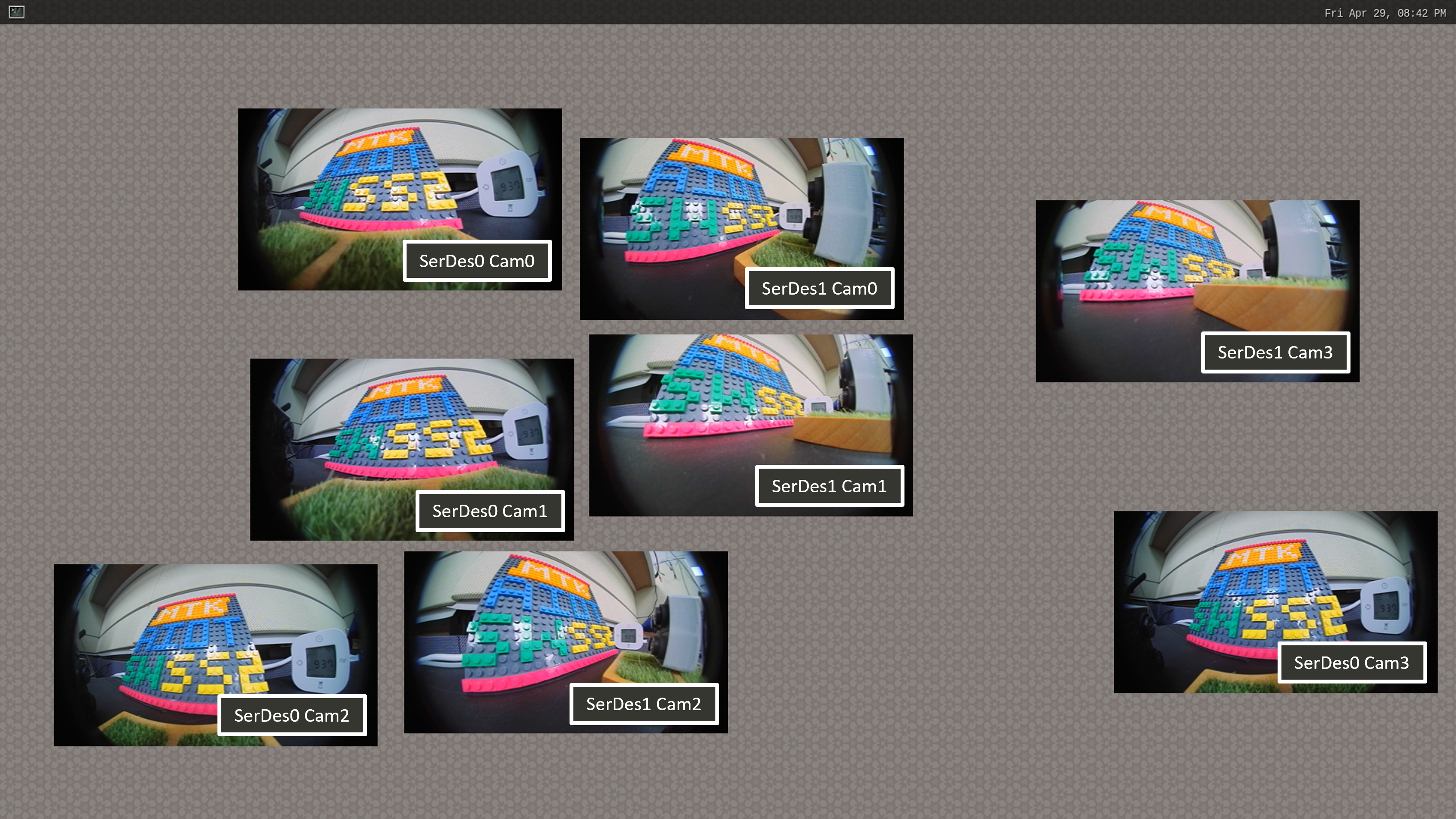
Show 8x SerDes stream on Weston