Genio 700 EVK Demo Requirements
This demonstration kit is very flexible and can be setup in various configurations, with software support for Yocto or Android. However for the purpose of this Quick Start Guide, a specific configuration is chosen with the following conditions:
IoT Yocto software build
D2 Camera Board enabled
Additional Items Needed for Quick Start Guide Demo
To support the demo, the following additional items are needed.
Two USB Cables (USB-2.0-A to Micro-B)
External PC for loading flash and interacting via command prompt
Setup PC Environment
Install the Genio Tools on your Linux or Windows PC.
Kit Hardware Installation
Insert the D2 Camera Board to CS10 on the main motherboard.

Camera Board Insertion
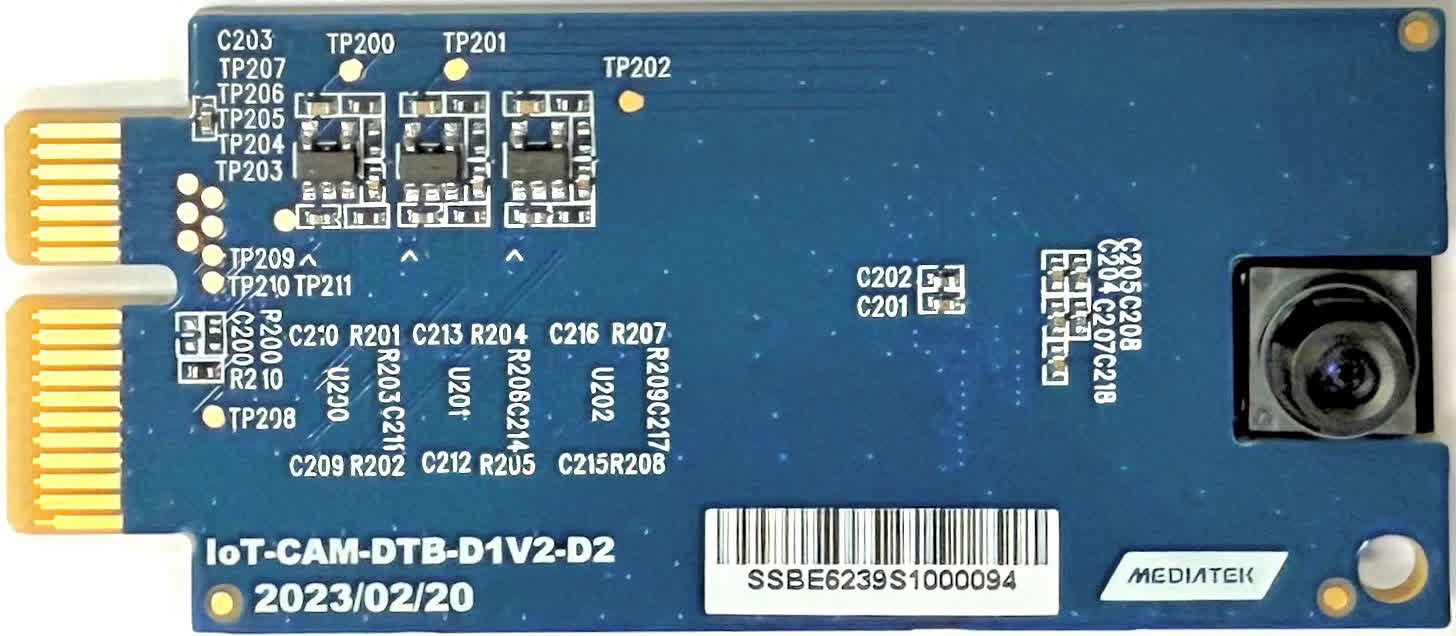
Camera Board D2
Connect a USB cable to connector labeled UART0 as shown in the image USB Port Locations below:
This requires installation of the Google Android USB driver as outlined in the Setup PC Environment section. If using Windows, open Device Manager and confirm that the driver appears under Android Device \ Android Bootloader Interface.
Connect a second USB cable to USB0 as shown in the image USB Port Locations below:
This requires installation of the FTDI VCP USB driver as outlined in the Setup PC Environment section. If using Windows, open Device Manager and confirm that the driver appears under Ports (COM & LPT) \ USB Serial Port (COMx), where x is the port assigned by your system.
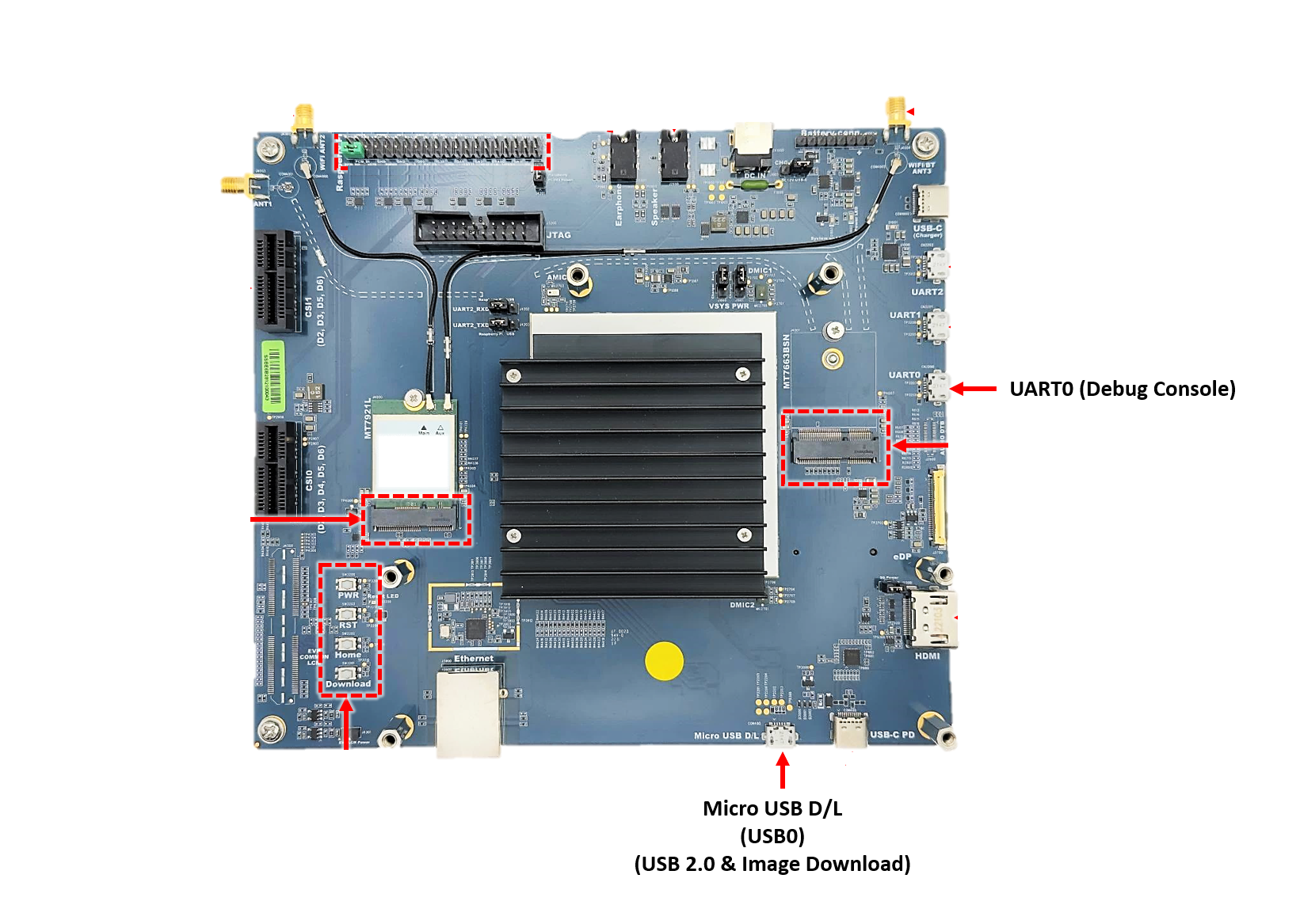
USB Port Locations
Further details regarding both USB drivers can be found in the flash trouble-shooting section.
Plug AC/DC power adapter into the connector.
Connect to the Serial Console
Setup the serial port for viewing debug output and interacting with the kit through a command line interface.
Check Device Manager that the USB COM port appears as a UART device under COM Ports
Configure your installed serial terminal emulator to use the serial port corresponding to the devices UART0 and operating with the baud rate set to 921600.
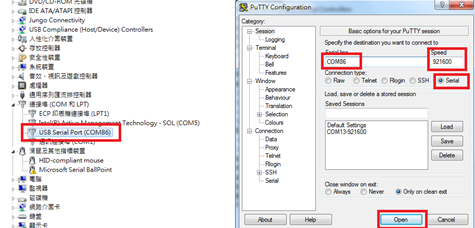
Example with Putty
Use dmesg to determine which USB serial ports have recently been connected:
dmesg | grep tty [299443.861514] usb 2-4.2.1: FTDI USB Serial Device converter now attached to ttyUSB0In this instance, the serial terminal is
ttyUSB0, which will be present under/dev/Connect to the device using a baud rate of
921600, for example, with Picocom:picocom -b 921600 /dev/ttyUSB0
Flash the Software
This guide shows how to “flash” (write) the demo image into the non-volatile flash memory of the main motherboard. The flashing process is performed through the USB0 connection. In order to write the on-board storage with Genio Tools, you need to set the IoT SoC in download mode, which allows Genio Tools to transfer a download agent binary to the SRAM of SoC. The download agent then provides a fastboot interface for subsequent image transfer and storage write operations.
Download the pre-built private board image to your local PC.
Note
Be sure to download the private image as it is required to run the demos in this quick start guide.
Unzip the image.
Note
Avoid having a long path name by installing to a root folder and shortening the file name if necessary, for example C:\\evk.
Open a Windows cmd window (to enter commands)
Change working folder to the image directory before running the
genio-flashcommands:
cd C:\evk
Flash the image using the overlay which enables both cameras. which enables Before flashing the board, check if there are certain board features you’d like to enable:
genio-flash --load-dtbo camera-imx214-csi0.dtbo --load-dtbo gpu-mali.dtbo --load-dtbo apusys.dtbo --load-dtbo video.dtbo
Once you see the
Looking for a MediaTek SoC ...prompt, start the process to boot the board in flash download mode.
Press and keep pressing the
Downloadbutton.Press and release the
RSTbuttonHold the
Downloadbutton until you see the logErasing 'mmc0'message, as shown below:
Reset the board to enter download mode
You should see flashing process started after releasing the volume up button. A typical successful log looks something like this:
Genio Tools: v1.4
Yocto Image:
name: Rity Demo Image (rity-demo-image)
distro: Rity Demo Layer 25.0-dev (rity-demo)
codename: scarthgap
machine: genio-700-evk
overlays: []
Looking for MediaTek SoC matching USB device 0e8d:0003
Opening COM11 using baudate=115200
Connected to MediaTek MT8390 SoC
Sending bootstrap to address: 0x201000
Jumping to bootstrap at address 0x201000 in AArch64 mode
erasing mmc0
< waiting for any device >
Erasing 'mmc0' (bootloader) request sz: 0x3a6800000, real erase len: 0x0
OKAY [ 0.233s]
… (shortened for brevity)
Rebooting OKAY [ 0.002s]
Finished. Total time: 0.003s
Note
The above command should be the only needed to flash the image with the configurations necessary in this Quick Start Guide. Further background and troubleshooting information including different command options are available in Flash Image to Board. A common problem is that the download does not start and simply keeps waiting for the device. More information is available in Missing “Yocto” Device Driver.
Once the kit boots up with the new flash image, debug log messages can be seen through UART0 in the Putty terminal window.
View of debug log messages appearing from UART0 upon board bootup
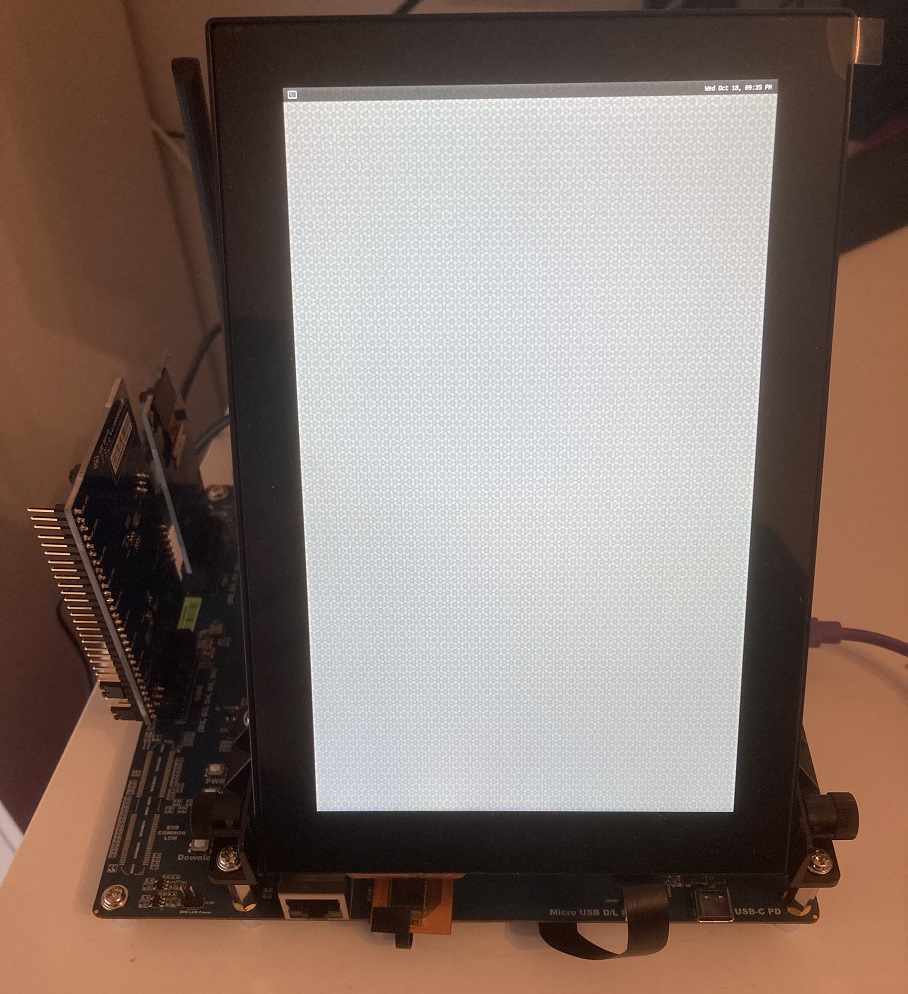
Verify the desktop boot screen appears on the display of the kit.
Log into board through UART0 interface.
Once board has fully booted, a login prompt is sent across UART0 similar to that shown below.
genio-700-evk login:
Type root, then enter, to log in.
NNStreamer Demos
NNStreamer is a set of GStreamer plugins that allow GStreamer developers to adopt neural network models, and neural network developers to manage neural network pipelines with their filters in a easy and efficient way. In order to demonstrate these features we first set up the camera with the v4l2-ctl command.
Camera Setup
We must first find the V4L2 device for the camera sensor.
List all devices with the following command and find the section named mtk-v4l2-camera:
# v4l2-ctl --list-device
MediaTek MDP3 ();
/dev/video2
(Shortened for brevity)
mtk-v4l2-camera (platform:mtkcam0):
/dev/video5
/dev/video6
/dev/video7
/dev/media1
The V4L2 “video” device nodes listed under mtk-v4l2-camera can be used for streaming.
The first camera device node in this example is /dev/video5. The device has enumberated as node number 5.
We will set the CAMERA_NODE_ID variable for use in further commands in these demos:
# CAMERA_NODE_ID=5
Important
The node number may change every time the system boots.
Note
In the above example there are 3 V4L2 devices representing Preview, Video, and Capture streams. The stream type of each device can be queried with the following command:
cat /sys/class/video4linux/video$CAMERA_NODE_ID/name
mtk-v4l2-camera@0-Preview
Before using the cameras, you must set the resolution 1920 * 1080 and the pixel format to the one relevant for the camera module, using the v4l2-ctl command:
v4l2-ctl -d /dev/video$CAMERA_NODE_ID --set-fmt-video=width=1920,height=1080,pixelformat=YUYV --stream-mmap --stream-count=10 --stream-to=/tmp/imx214.yuv --verbose
v4l2-ctl -d /dev/video$CAMERA_NODE_ID --set-fmt-video=width=1920,height=1080,pixelformat=UYVY --stream-mmap --stream-count=10 --stream-to=/tmp/ap1302.yuv --verbose
Confirm that a live video stream can be shown using gst-launch-1.0 to display the camera output on the screen:
gst-launch-1.0 v4l2src device=/dev/video$CAMERA_NODE_ID ! video/x-raw,width=1920,height=1080,format=YUY2 ! v4l2convert output-io-mode=dmabuf-import ! video/x-raw,width=1280,height=720 ! waylandsink sync=false
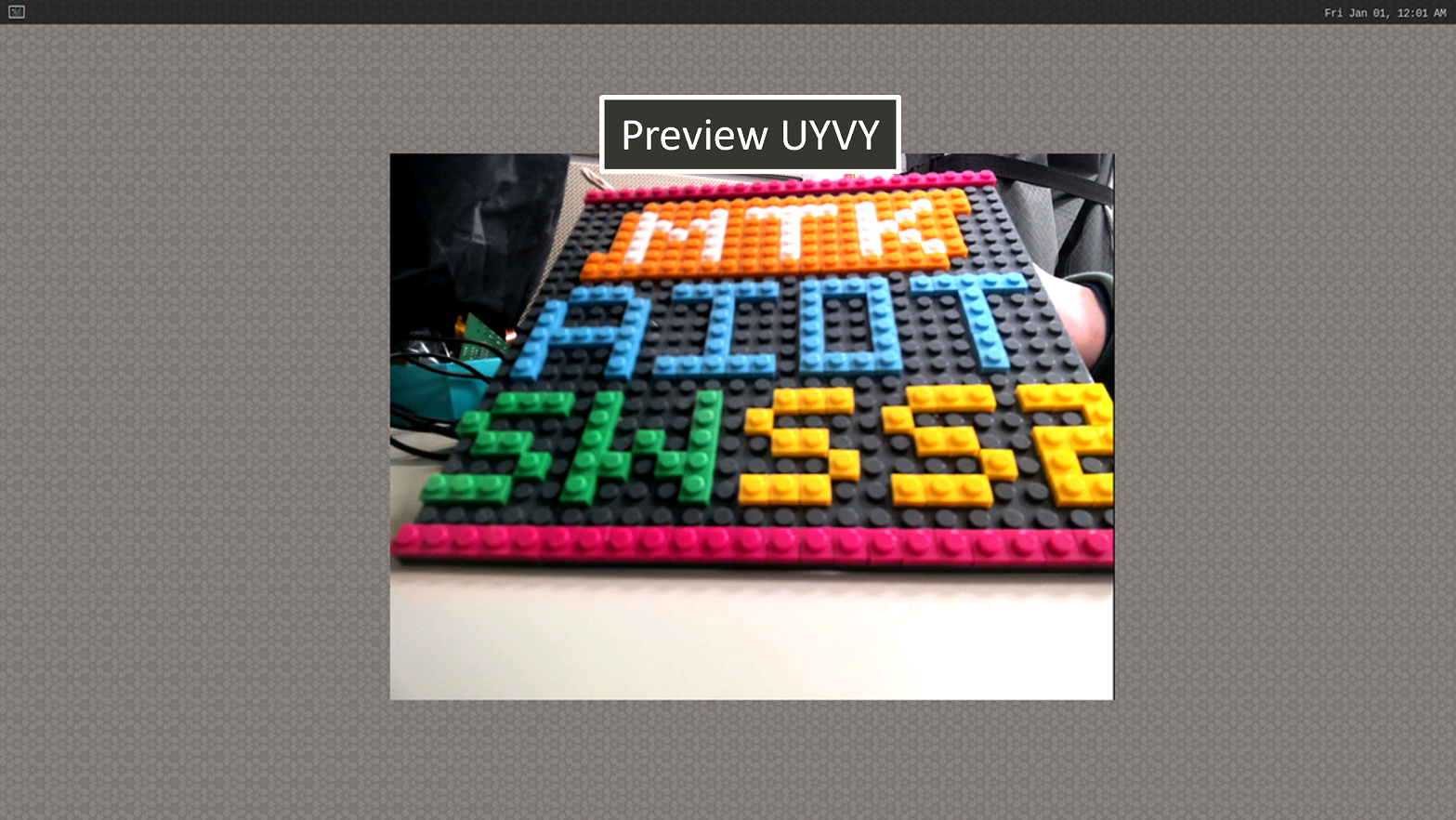
Show Preview stream on Weston
Before proceeding to the next demos, type CTRL+C to end this video stream.
CTRL+C
Further details about hardware operation, background theory, or troubleshooting can be found in the BSP User Guide - Launch Camera section.
NNStreamer Environment Setup
The following NNStreamer demos are run using a python script run_nnstreamer_example.py.
This script is configured using environment variables specifying which camera type to use, which mode to use, which processing engine to use, and the device node of your camera as determined above.
Set the following environment variables before running any of the following demos:
# CAM_TYPE=rawsensor
# MODE=1
# ENGINE=stable_delegate
# CAM_TYPE=yuvsensor
# MODE=1
# ENGINE=stable_delegate
Pose Detection
Set the APP variable so the script runs the proper demo. Then run the script.
APP=pose_estimation
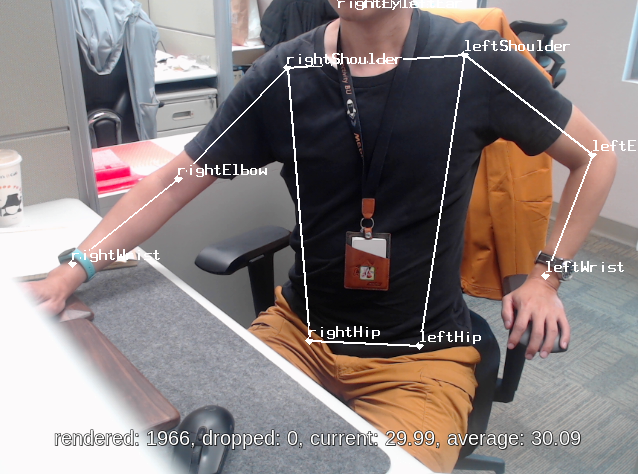
python3 /usr/bin/nnstreamer-demo/run_nnstreamer_example.py --app $APP --cam_type $CAM_TYPE --cam $CAMERA_NODE_ID --engine $ENGINE --performance $MODE
A video stream from the camera should now be displayed on the screen with indicators similar to the below image added.
Before proceeding to the next demos, type CTRL+C to end this video stream.
CTRL+C
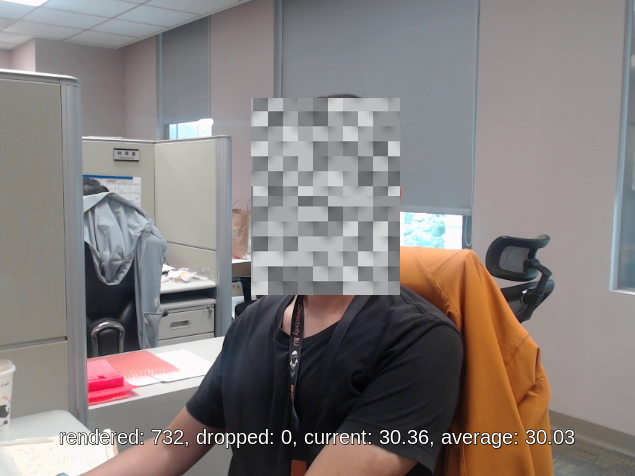
Face Detection
Set the APP variable so the script runs the proper demo. Then run the script.
APP=face_detection
python3 /usr/bin/nnstreamer-demo/run_nnstreamer_example.py --app $APP --cam_type $CAM_TYPE --cam $CAMERA_NODE_ID --engine $ENGINE --performance $MODE
A video stream from the camera should now be displayed on the screen with the face blocked out as shown in the below image.
Before proceeding to the next demos, type CTRL+C to end this video stream.
CTRL+C
OpenGL ES Demos
On IoT Yocto, there are several OpenGL ES applications that can used to check that the GPU is running and well integrated within the Wayland/Weston system. In this section we introduce two GLES applications: weston-simple-egl and kmscube.
They both use the GPU to render content, but they have different approaches to creating their graphic windows.
Display a Rotating Cube
This is a simple GLES program demonstrating how to drive bare metal graphics without a compositor (Wayland), using DRM/KMS, GBM, and EGL for rendering content using OpenGL ES.
After having typed CTRL+C from the above step, you should see only the simple desktop window which shows the date and time in the upper right hand corner. This desktop graphic is being driven by the Weston service. In this demo, we will display a rotating cube by running the kmscube command. However kmscube will create its own window on which it renders content. So, before we launch kmscube, we must make sure that no other window system occupies the display. This means stopping the Weston process that drives the desktop.
Stop
westonservice if it already started.systemctl stop westonConfirm that the desktop disappears and you see only a dark screen on the HDMI monitor.
Launch
kmscubeand confirm that you can see a rotating cube as shown in below figure.kmscube
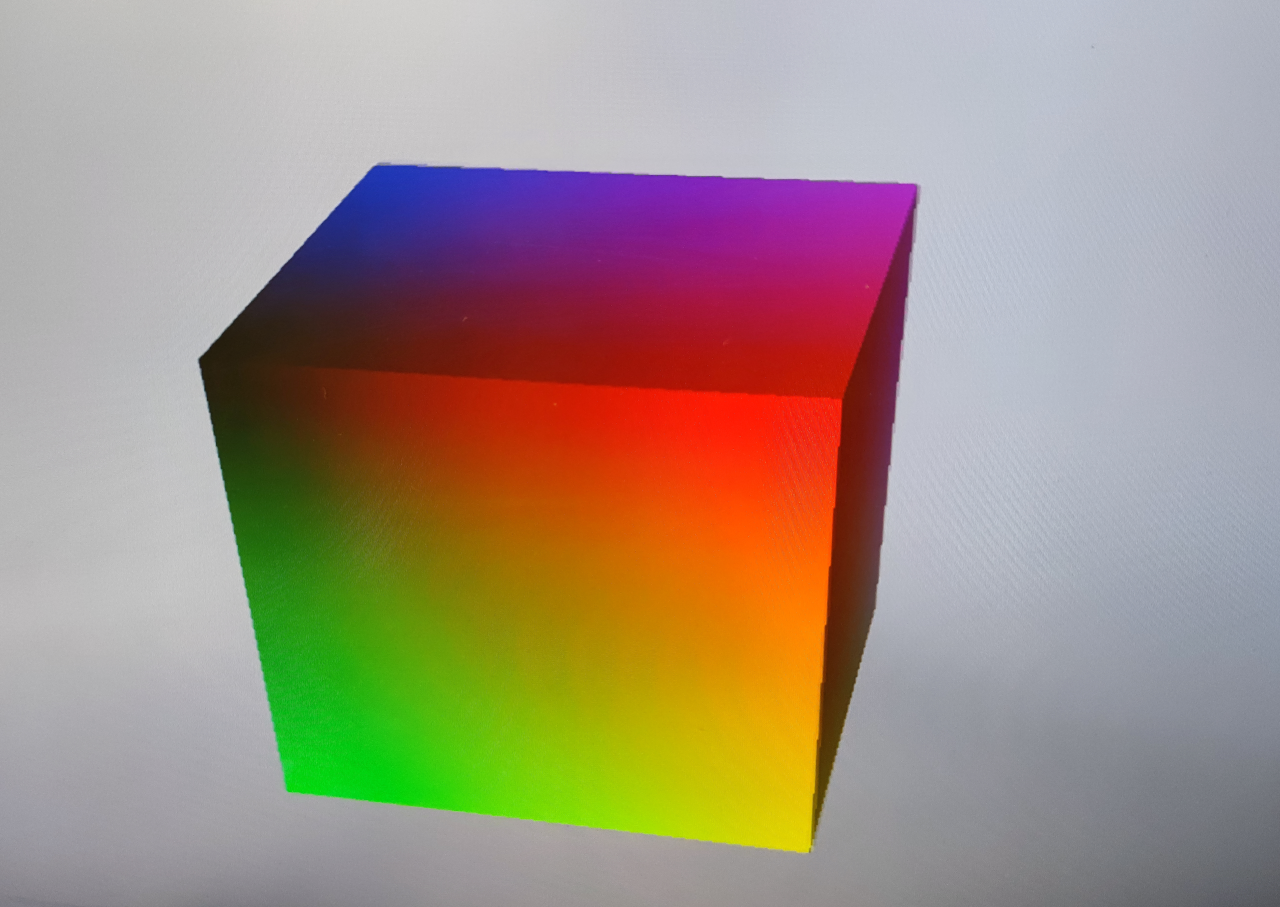
Screenshot of kmscube
Type
CTRL+Cto stop displaying the rotating cube.
Display a Rotating Triangle
This is a simple demonstration GLES program that draws a rotating colorized triangle on a transparent Wayland window. This program is not responsible for creating the window, and instead merely renders its content on an existing window which Weston creates. So, before launching it, we must start Weston.
Start
westonservice if it is not started yet.systemctl start westonConfirm that the desktop reappears which shows the date and time in the upper right hand corner.
Launch
weston-simple-egland confirm that you can see a rotating triangle as shown in below figure.weston-simple-eglType
CTRL+Cto stop displaying the rotating triangle.
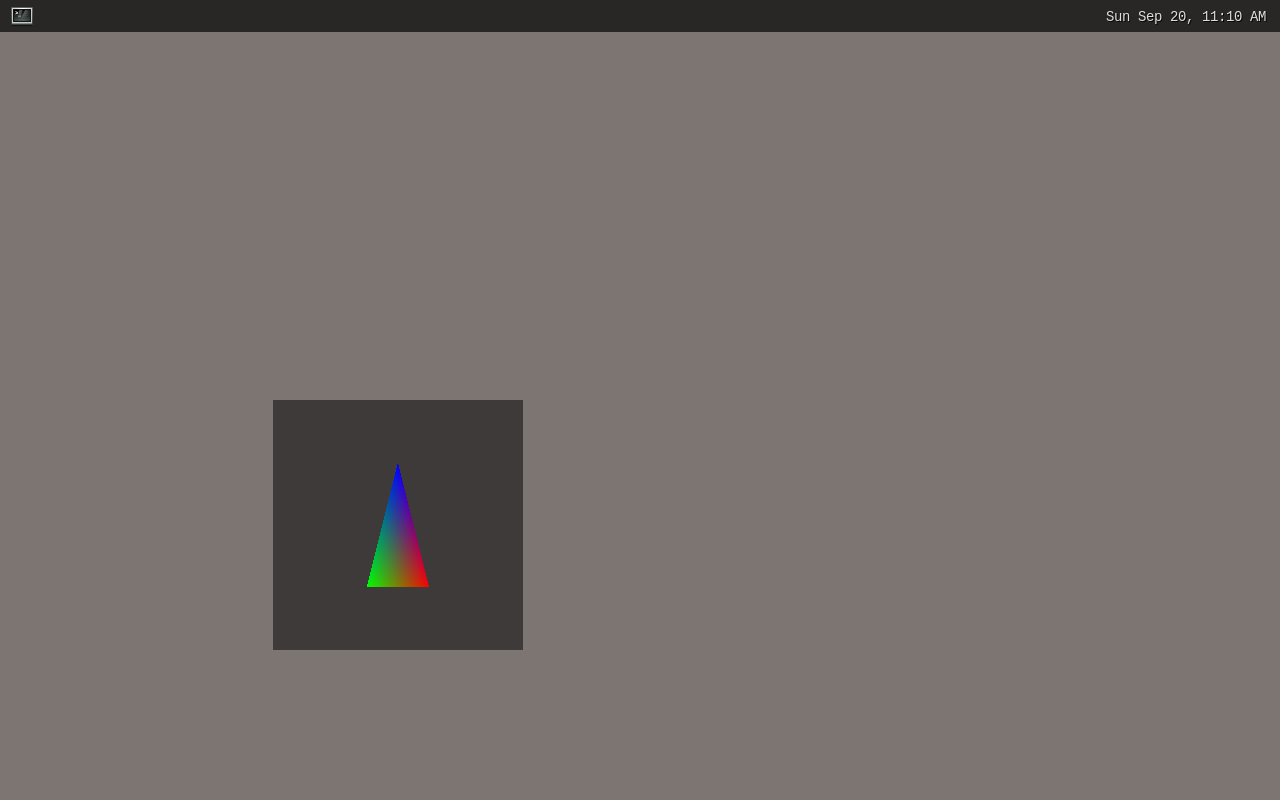
Screenshot of weston-simple-egl
Additional Details
You can find source code for weston-simple-egl in the Weston codebase: $BUILD_DIR/tmp/work/aarch64-poky-linux/weston/8.0.0-r0/weston-8.0.0/clients/simple-egl.c or weston github.
You can find source code in Weston codebase: $BUILD_DIR/tmp/work/aarch64-poky-linux/kmscube/git-r0/git or mesa gitlab.
Further details about the GPU, background theory, or troubleshooting can be found in the BSP User Guide - GPU section.